958 B
958 B
px4使用外部定位器(VR定位器)
定位数据发送到PX4
- 定位数据使用mavlink发送数据包为 ATT_POS_MOCAP,频率30Hz 通过串口发送
代码编译设置
- px4 版本 1.7.3
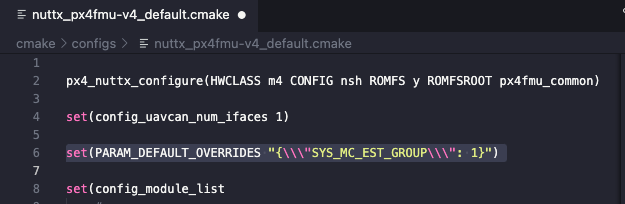
- 将如下代码复制到cmake/configs/nuttx_px4fmu-v4z-default.cmake这个路径中去
set(PARAM_DEFAULT_OVERRIDES "{\\\"SYS_MC_EST_GROUP\\\": 1}")
- 编译生成固件刷入飞控
QGC参数配置
- SYS_MC_EST_GROUP 选择local_position_estimator

- LPE_FUSION 只选择fuse vision position

- ATT_EXT_HDG_M 选择vision
