更新论文
This commit is contained in:
parent
9af6968d86
commit
cce1fc5fde
@ -6,137 +6,209 @@
|
||||
|
||||
本人呈交的毕业设计论文,是在导师的指导下,独立进行研究工作所取得的成果,所有数据、图片资料真实可靠。尽我所知,除文中已经注明引用的内容外,本学位论文的研究成果不包含他人享有著作权的内容。对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确的方式标明。本学位论文的知识产权归属于培养单位。
|
||||
|
||||
|
||||
|
||||
## 摘要
|
||||
|
||||
随着无人机技术的发展,无人机在各个领域都发挥了巨大的作用,但是无人机的保有量年年升高,无人机操作员的数量却一直增长缓慢,培养一个优秀的无人机操作员需要一两年的时间,而生产一架无人机只需要一天甚至更短的时间。无人机操作员的培养是困难的,但是如果通过软件实现无人机自动巡检,通过软件代替人操作之后,在软件开发完成之后,软件就会取代人的作用,且软件的复制是极为迅速的,可以迅速填补无人机操作员的空缺。
|
||||
|
||||
本文设计了一款实现简单,同时效果不错的无人机自动化巡检软件,通过使用该软件巡检人员只需要录制一遍标准的航线,之后就可以通过装载航线实现全自动的巡检,将大大提高无人机巡检的效率,同时减小了对无人机操作员的要求,无人机操作员只需要会基本的无人机操作就可以完成巡检工作。
|
||||
|
||||
## Abstract
|
||||
|
||||
With the development of drone technology, drones play a huge role in various fields, but the number of drone ownership rises year after year, the number of drone operators has been growing slowly, and it takes one or two years to train a good drone operator, while it takes only one day or even less to produce a drone. The training of drone operators is difficult, but if automatic drone inspection is achieved through software, after the software replaces human operation, the software will take over the role of human after the software development is completed, and the software is extremely fast to replicate and can quickly fill the vacancies of drone operators.
|
||||
|
||||
This paper designs a simple to implement, while the effect is good UAV automatic inspection software, by using the software inspectors only need to record the standard route once, after which they can achieve fully automatic inspection by loading the route, will greatly improve the efficiency of the UAV inspection, while reducing the requirements of the UAV operator, the UAV operator only needs to know the basic UAV operation can complete the inspection work.
|
||||
|
||||
|
||||
|
||||
## 目次
|
||||
|
||||
|
||||
|
||||
### 绪论
|
||||
|
||||
#### 项目背景
|
||||
#### 引言
|
||||
|
||||
无人机技术的发展,无人机的优势,无人机数量远大于飞手数量,飞手培养难度大
|
||||
|
||||
无人机诞生之初,主要是为军队作战领域所准备的,之后逐渐形成了三种类型的飞行器,包括无飞行员驾驶的飞机、作战训练的无人靶机和与地面站结合的遥控飞机等[6]。近年来,随着现代各种高水平科学技术的不断发展,无人机的应用领域已经从最初单一的军事作战扩展过渡到经济建设、生态保护、社会发展和科学研究等领域中,普及程度大大提高,应用范围也越来越广泛。
|
||||
随着无人机技术不断发展,各行业对无人机的自主飞行技术提出了一定的要求,要求无人机能够自动收集感应处理周围环境数据信息,自主飞往设置的目标点或兴趣点,未来无人机的飞行智能化水平将越来越高。而近几年价格低廉的消费级无人机市场的蓬勃发展,使人人拥有无人机成为了可能,将无人机结合移动设备,用应用软件控制无人机自主飞行来完成预定的路线可以使无人机的应用领域和想象空间得到彻底的释放,为各行各业提供更多的服务,大大扩展无人机的应用领域[7]。在经济建设方面,无人机能够进行如航拍、摄影、遥感、地理测绘、领空保护、灾情检测、交通监视、农林播种打药等工作。在生态保护方面,无人机可用于大气、水体等的污染监测、配合警方打击危害生态行为和群体、保护生态区综合监测、特殊气象探测等。在科研领域方面,无人机可用于大气或海洋探测、采样与研究、新技术研究飞行验证、科学考察、考古搜寻、地质勘探等[8]。在这些特定领域,无人机的自主飞行在关键时刻起到人无法替代的作用,减少人力成本,提高工作效率,能深入到某些人无法到达的地方帮助科研工作者探测环境状况,提取关键数据,避免人力财力物力的损失和危险情况的发生。
|
||||
无人机(Unmanned Aerial Vehicle),即无人驾驶飞行器,通常被称为无人驾驶飞机或无人驾驶飞机系统,是不需要人类飞行员操作的飞机,是一种由空气动力或电力驱动的航空器,人可以在地面通过无线电遥控或预编的程序来控制其飞行。
|
||||
|
||||
#### 项目目标与期望
|
||||
无人机分为三个大类,多旋翼无人机,固定翼无人机,无人机直升机,其中无人直升机最大的优势是灵活性强,可以随时随地垂直起飞和在空中悬停,但是其结构复杂,维护困难,同时成本较高;固定翼无人机在军用和民用领域应用较广泛,其飞机尺寸一般较大,其主要优点是飞行速度快、时间长、距离远、负载量大,缺点是不能定点悬停,因此相对多旋翼无人机和无人直升机其灵活性和功能性会大大降低。多旋翼无人机结构简单,操纵灵活,成本较低,在现阶段应用十分广泛。
|
||||
|
||||
实现无人机的自动化巡检
|
||||
随着技术的发展无人机在工业巡检发挥着越来重要的作用,现在无人机巡检已经广泛应用到各种巡检场景之中,如电网巡检,风力发电巡检,输油管道巡检,无人机在这些场景中的应用大大提高了巡检的效率,为了经济的发展做出了贡献 。
|
||||
|
||||
#### 研究目的与意义
|
||||
|
||||
随着无人机在巡检方面的应用的范围和规模越来越大,产生了自动化巡检的需求,现如今无人机的保有量已经达到数十万架,而合格的无人机操作员只有几万人,并且无人机操作员的培养是缓慢的,一个合格的无人机操作员可能要一两年的时间,但是一架无人机可能一个小时就生产出来了。无人机操作员的培养是困难的,但是如果通过软件实现无人机自动巡检,通过软件代替人操作之后,在软件开发完成之后,软件就会取代人的作用,且软件的复制是极为迅速的,可以迅速填补无人机操作员的空缺。本文的目的就是设计一款无人机的自动化巡检app。
|
||||
|
||||
### 相关技术分析
|
||||
|
||||
#### Android开发
|
||||
|
||||
Android 开发简介
|
||||
Android是一种基于Linux的自由及开放源代码的操作系统,Android 分为四个层,从高层到低层分别是应用程 序层、应用程序框架层、系统运行库层和 Linux 内核层。谷歌公司推出了开源的Android 系统,现在应用非常广泛,开发环境不会受到各种条条框框的限制,开发者任意修改开放的源代码来实现与开发各种实用的手机App软件,具有高级图形显示、界面友好等特点。Android 系统因其免费开源的特性受到广大个人开发者和企业的青睐,同时网上存在大量的应用实例和开发经验,因此选择android 作为开发平台,可以减小我们的开发难度。
|
||||
|
||||
#### 无人机
|
||||
|
||||
无人机技术简介,及作用
|
||||
|
||||
|
||||
#### 大疆SDK
|
||||
|
||||
大疆sdk 简介
|
||||
|
||||
DJI Mobile SDK 是无人机生产商大疆公司为开发者在移动终端推出的可以为 DJI飞行平台量身定做移动应用软件的开发工具包。该 SDK 通过如飞行稳定、电池管理、信号传输通讯的低层次功能简化了应用程序开发过程,开发者不需要具备机器人或嵌入式系统的背景知识,从而专注于集成到应用程序的飞行器功能开发上,为飞行器开发出个
|
||||
性、独特、自定义的手机 App,远程控制无人机完成自主设定的创意飞行,从而发挥出飞行器的最大潜力。
|
||||
开发人员可以通过 SDK 访问 DJI 无人机的特性和功能。开发人员可以操控无人机自
|
||||
动飞行,控制摄像机和云台,接收实时视频和传感器数据以及监视其他组件的状态。SDK
|
||||
内容包括:(1)一个可以导入到 Android 或 iOS 应用程序中以访问 DJI 产品的库/框架;(2)
|
||||
飞机模拟器和可视化工具;(3)调试器和远程日志记录器;(4)示例代码和教程;(5)开发人
|
||||
员指南和 API 文档
|
||||
|
||||
DJI Mobile SDK 功能丰富,开发者可以充分利用其 API 接口来实现最大限度控制大
|
||||
疆无人机飞行,其主要包含以下几大基础功能:
|
||||
(1) 飞行控制
|
||||
DJI Mobile SDK 允许以三种方式控制飞机飞行:(1)手动:飞行员用遥控器飞行,而
|
||||
SDK 允许监控实况视频和传感器数据;(2)虚拟棒命令:SDK 允许虚拟生成遥控器棒运
|
||||
动,模拟飞行员;(3)任务:方便,易于实施飞机的高级控制;(4)虚拟杆命令和任务允许
|
||||
简单但强大的自动飞行控制 DJI 飞机[
|
||||
39, 40]。
|
||||
(2) 照相
|
||||
无人机上自带的相机和可转动的万向节是高度可编程的,具备以下几种功能模式:
|
||||
·相机模式:可进行视频和静态图像捕捉;
|
||||
·曝光:快门、ISO、光圈和曝光补偿都可进行个性化定制,以实现最大的灵活性;
|
||||
·图像参数:具备可调的纵横比、对比度、色调、锐度、饱和度和滤镜;
|
||||
·视频参数:具有分辨率和帧速率调节;
|
||||
·方向:使用万向节,相机方向和运动方向和自动进行。
|
||||
(3) 现场视频
|
||||
利用 DJI Mobile SDK 可通过无人机上的主摄像头拍摄传送的视频来进行现场直播,
|
||||
现场的实时视频即使照相机在抓拍图片或存储视频图像到内存卡也不影响其即时功能。
|
||||
(4) 传感器数据
|
||||
无人机上自带着丰富的传感器,可通过 Mobile SDK 来获取到例如 GPS 位置、指南
|
||||
针、气压计、飞行速度高度等传感器数据,其读取的频率可达到 10Hz。
|
||||
|
||||
|
||||
### 系统分析与设计
|
||||
|
||||
#### 需求分析
|
||||
|
||||
录制航线,记录航线,航点记录处理,飞行控制(位置控制)
|
||||
为了能够实现无人机的自动化巡检,需要实现能够在录制过程中实时记录无人机的飞行数据,同时保存下来,在复飞的时候能够根据这些信息进行复现录制时无人机的飞行轨迹和动作。同时为了后期数据分析,优化效果需要有日志记录的功能。故本次毕业设计的需求共有以下四种,航点数据记录,航点数据处理,飞行控制,飞行日志记录。
|
||||
|
||||
##### 航点记录
|
||||
##### 航点数据记录
|
||||
|
||||
要想要实现复飞中能够准确的复现录制时的飞行轨迹和无人机动作,就需要最大可能的记录飞行的数据,需要记录的数据主要包括无人机的实时GPS信息和无人机的航向,同时还需要记录无人机的云台相机的数据,包括是否拍照,是否录像。根据GPS信息可以记录无人机的飞行轨迹,根据云台相机信息可以记录无人机在什么时候怎么拍照的。通过以上信息就可以复现无人机录制时候的飞行轨迹个和飞行动作。
|
||||
|
||||
##### 航点数据处理
|
||||
|
||||
##### 轨迹复现控制
|
||||
由于无人机的GPS更新频率只有10HZ 这个频率的数据并不能满足飞行控制的需求,且记录的数据不够平滑,直接使用原始数据来控制无人机的飞行会导致无人机的飞行不够平稳,飞行过程中会存在抖动。同时由于无人机记录的GPS信息是大地坐标系:也叫经纬高坐标系(LLA: Longitude Latitude Altitude),是无法直接用于导航控制的,所以需要将航点文件的中的坐标部分转换成站心坐标系:也叫东北天坐标系(ENU: East North Up),故航点数据处理一共要执行三个操作,首先是将航点文件记录的GPS信息由大地坐标系转成东北天坐标系,之后对转化后的数据做一次数据平滑的操作,最后对航点数据进行插值处理,手动提高控制频率。
|
||||
|
||||
##### 云台相机控制
|
||||
##### 飞行控制
|
||||
|
||||
因为要复现录制过程中完整的飞行轨迹,所以无人机的飞行控制不能使用waypoint模式也就是航点模式,航点模式飞行虽然更加稳定,但是航点模式有个缺陷就是航点与航点之间是直线飞行,且航点之间的距离有最小限制,实测结果最小距离在3M的时候效果会比较出色,但是这样就无法实现完全复现录制时的全部飞行细节,所以无法通过waypoint模式来实现飞行控制,DJI SDK 提供了另外一种飞行方式,可以通过发送虚拟摇杆命令的形式控制无人机的飞行,这个模式可以满足需求。
|
||||
|
||||
由于在巡检过程中还需要无人机执行拍照或者录视频的动作来采集数据,所以需要无人机无人机在自动复飞的时候也可以准确复现无人机的拍照动作,同时由于无人机拍照或者录视频需要在指定地点拍出来的东西才有价值,所以需要精准控制无人机的拍照位置,保证无人机自动复飞时候的拍照点和录制时候的拍照点位置误差很小,这样自动复飞任务才有价值。
|
||||
|
||||
##### 飞行日志记录
|
||||
|
||||
由于无人机在飞行过程中很难由人眼或其他设备直接近距离观察无人机的飞行状况,无人机也有时会发生事故或者飞行不稳定。为了分析事故的原因,就需要把无人机在飞行过程中产生的数据记录下来,可以根据数据分析无人机发生事故的原因,同时也可以根据无人机的飞行数据对无人机的控制进行调优,优化无人机的飞行状况。
|
||||
|
||||
#### 可行性分析
|
||||
|
||||
* 航点数据记录 通过DJI SDK可以以10HZ的频率获取到无人机的飞行信息,同时也可以获取到当前无人机的云台角度和相机状态。
|
||||
* 航点数据处理 可以写一个函数,实现对数据的转换和处理
|
||||
* 飞行控制 通过DJI SDK的虚拟摇杆命令可以模拟遥控器发出的控制指令,从而达到控制无人机飞行的效果,同时可以通过DJI SDK的action实现无人机的拍照控制
|
||||
* 飞行日志记录 可以自定义日志文件并保存到本地
|
||||
* 综上所述整个系统是可以实现的。
|
||||
|
||||
#### 系统总体设计
|
||||
|
||||
根据需求分析,整个系统存在两个核心,一个是录制航线,一个是航线复飞,记录的数据可以实现录制航线的复现,这就需要对数据进行选择和处理,同时要设计一个简单可靠的控制器,实现对无人机的飞行控制。这个飞行控制系统可以根据采集到的数据对实现无人机对录制航线的精准复现。创建三个activity 分别是recordactivity(录制界面),reflyactivity(复飞界面),normalactivity(普通界面),recordactivity负责实现飞行数据的记录和存储,reflyactivity负责实现飞行数据的处理和复飞任务的执行,normalactivity是传统飞行界面。
|
||||
|
||||
#### 功能模块设计
|
||||
|
||||
##### 飞行界面设计
|
||||
|
||||
##### 航点数据获取
|
||||
首先创建基础的飞行界面,这些基础的飞行界面要能显示无人机的飞行过程的中关键信息,之后在基础的飞行界面上根据不同的任务界面为不同的任务界面添加不同的组件。recordactivity在基础界面上加入设置航点文件名称、开始录制、停止录制的按键,reflyactivity在基础界面上加入选择航点文件、加载航点文件、开始执行复飞任务、停止复飞任务四个按键,normalactivity只显示基础界面。
|
||||
|
||||
##### 航点数据存储
|
||||
##### 位置控制器
|
||||
|
||||
##### 航点数据读取
|
||||
由于无人机要精准复现无人机录制时的飞行轨迹且通过使用大疆SDK可以直接控制无人机的速度,可以直接选用简单好用的位置控制器,且不需要使用串级PID因为内环的速度控制已经由大疆SDK实现,只需要使用位置控制器PID输出期望速度直接发送给无人机就可以实现对无人机的位置控制了。
|
||||
|
||||
##### 航点数据优化
|
||||
##### 航点数据获取和存储
|
||||
|
||||
##### 飞行控制设计
|
||||
根据控制器的设置,实现位置控制器需要输入当前坐标和期望坐标,这就需要记录无人机的实时的GPS信息并保存下来,同时因为无人机要拍照和录视频所以需要记录无人机的航向、云台相机角度、是否拍照、是否录像。保存了这些参数就可以实现对无人机飞行控制和拍照控制了。这些数据可以通过DJI SDK提供的API接口获取。
|
||||
|
||||
##### 轨迹复现
|
||||
为了存储这些数据可以设计一个list 数据,将录制中的所有信息按时间顺序存入数组中,在停止录制之后将数组中的数据转成json文件存储到本地文件。
|
||||
|
||||
##### 航点数据读取和处理
|
||||
|
||||
用户在点击选择文件按钮之后会弹出小窗显示文件列表,在选中文件之后小窗消失并提示选中航点文件的名称,用户点击装载之后执行对航点数据的读取和处理。
|
||||
|
||||
航点数据的读取通过将文件从json格式重新恢复成自定义的list数组。这部分是由于无人机的基础数据更新频率只有10HZ,数据频率太低会导致在复飞时无人机的飞行不够平稳,根据这一情况,需要对航点做优化处理。且由于GPS 信息记录的是大地坐标系:也叫经纬高坐标系(LLA: Longitude Latitude Altitude),是无法直接用于导航控制的,所以需要将航点文件的中的坐标部分转换成站心坐标系:也叫东北天坐标系(ENU: East North Up),将GPS坐标转成东北天坐标系之后就用于导航控制了。
|
||||
|
||||
##### 飞行轨迹复现
|
||||
|
||||
在用户点击开始按键之后将在装载过程中处理好的飞行数据传入复飞控制函数中,复飞函数中循环读取航点数据,并将读取到数据放入位置控制器中实现对无人机的飞行轨迹的复现,同时当读取到其他航点模式时执行拍照动作或者录视频的动作。
|
||||
|
||||
### 系统实现
|
||||
|
||||
#### 总体架构
|
||||
|
||||
|
||||
|
||||
#### 功能模块实现
|
||||
|
||||
##### 航点数据获取
|
||||
##### 飞行界面
|
||||
|
||||
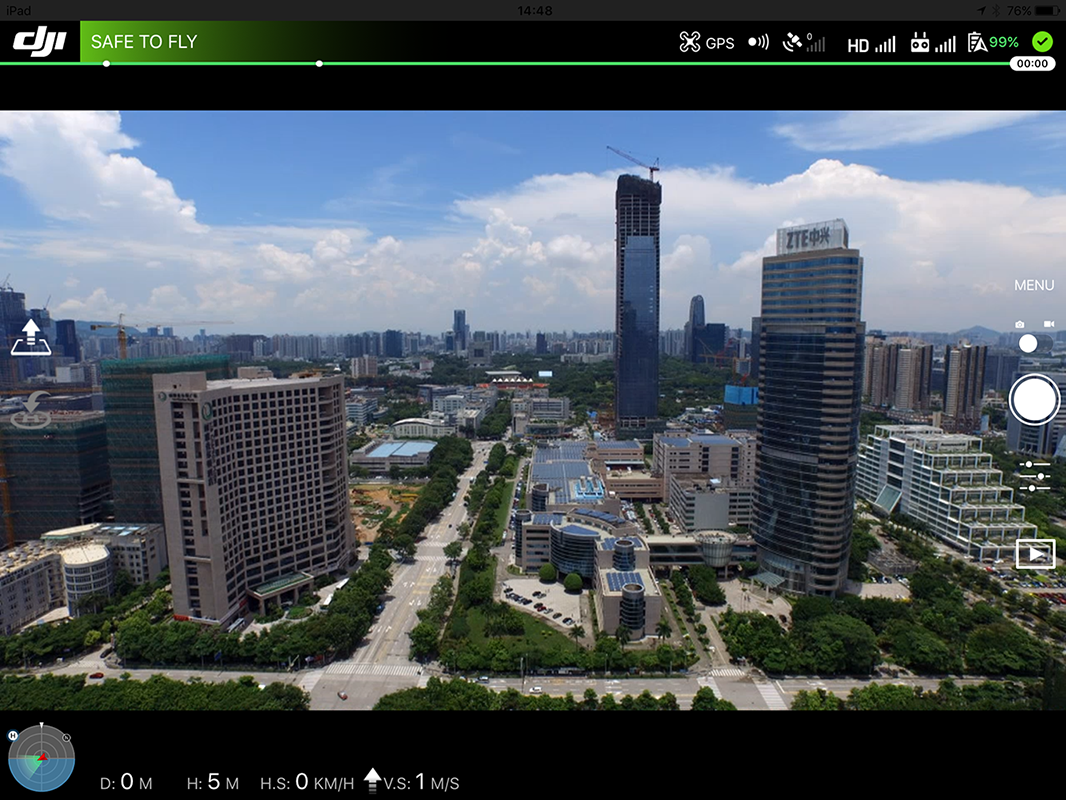
无人机的飞行界面需要显示很多信息,一般包括如下几点
|
||||
|
||||
显示相机的实时画面
|
||||
显示无人机的状态(飞机遥测数据、电池电量、信号强度等)。
|
||||
允许用户查看和改变产品设置
|
||||
无人机具有的基本功能,如自动起飞、降落、回家。
|
||||
|
||||
制作一个无人机的飞行应用程序需要先提供这些基础的核心功能,然后才能在这个基础上添加独特的功能,DJI UX SDK提供了具有这些核心功能的UI元素,因此可以用来加快开发时间。通过使用默认的UX SDK 不需要添加其他的代码就可以创建一个基础的飞行界面,效果如下图所示
|
||||
|
||||
|
||||
|
||||
通过使用大疆的提供的DJI UX SDK来实现各个界面的基础飞行布局之后,再根据不同的界面需求添加不同的按键,录制节目添加设置文件名称,开始录制,停止录制三个按键,复飞节目添加选择航点文件,装载航线,开始,停止四个按键。普通模式只使用基础的飞行布局。
|
||||
|
||||
##### 位置控制器
|
||||
|
||||
使用pid 控制器实现对无人机的位置控制,通过读取无人机的当前位置以及期望位置,将两个值做差,得出的结果放入到pid 控制器中,得出的结果就是期望速度,通过DJI SDK 发送给无人机即可实现对无人机的位置控制。
|
||||
|
||||
##### 航点数据获取和存储
|
||||
|
||||
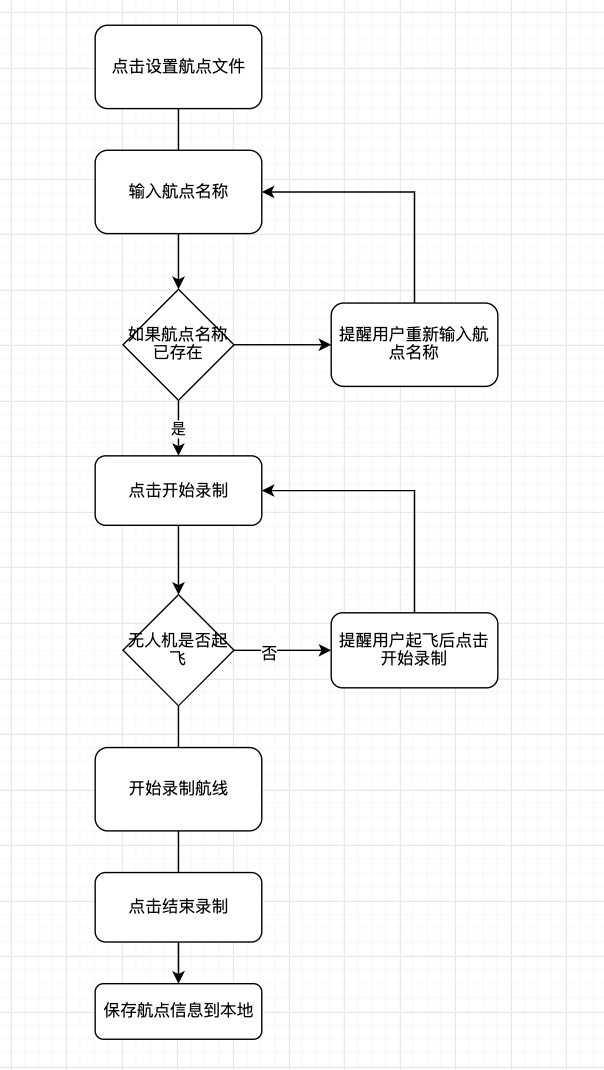
在录制界面中添加三个按键,分别是设置文件名称,开始录制,停止录制。用户先点击设置文件名称,如果创建的文件名称和之前的文件名重复则创建失败,提醒用户重新创建,当用户点击开始录制时需要无人机处于飞行状态否则无法开始,提醒用户起飞无人机后重新开始。用户点击停止录制时,会根据用户设置的文件名自动创建相应的文件,并将航点数据存储到本地。如下图所示。
|
||||
|
||||
|
||||
|
||||
创建自定义航点数据类mylatlng用存储航点数据,包含的数据类型有Lat、lng、alt、uavyaw、WaypointActionType,其中WaypointActionType有四个种类,分别是STAY、STOP_RECORD、START_TAKE_PHOTO、START_RECORD。使用大疆SDK大疆SDK的LocationCoordinate3D获取当前无人机的经度纬度高度,创建相机状态的监听,获取相机的状态,当相机不在拍照时设置WaypointActionType为STAY,拍照时设置为START_TAKE_PHOTO,开始录视频时为START_RECORD,在录制视频期间时保持WaypointActionType为STAY,当视频录制结束时设置WaypointActionType为STOP_RECORD。记录数据时当相机没有活动时数据保持最大频率的记录,也就是10HZ,当相机发生活动时强制记录一条航点信息。点击停止录制时会自动把数据转成json格式并写入本地文件中。
|
||||
|
||||
##### 航点数据读取和处理
|
||||
|
||||
通过选择制定的文件,将指定文件路径的航点文件转成json文件,并将json文件转成自定义的list数组文件。这样就完成了航点数据的读取。读取完成的数据还需要进一步处理才能满足飞行控制的要求,首先要对航点数据进行数据平滑的处理,这里使用的是加权滑动平均法。简单来说,滑动平均法把前后时刻的一共2n+1个观测值做平均,得到当前时刻的滤波结果。滑动平均法还有一个升级版本,也就是我们要用的加权滑动平均法。实际场景中,每个观测值的重要程度不同,忽略每个观测值的置信度直接平均不能得到精确的结果,所以就需要给观测值加权。加权滑动平均法的公式如下:
|
||||
|
||||
![[公式]](https://www.zhihu.com/equation?tex=p_%7Bt%7D%3D%5Cfrac%7B%5Csum_%7Bi%3D1%7D%5E%7Bn%7D%7B%28x_%7Bt-i%7D%2Aw_%7Bt-i%7D%2Bx_%7Bt%2Bi%7D%2Aw_%7Bt%2Bi%7D%29%2Bx_%7Bt%7D%2Aw_%7Bt%7D%7D%7D%7B2n%2B1%7D)
|
||||
|
||||
![[公式]](https://www.zhihu.com/equation?tex=w_%7Bt%7D) 为 ![[公式]](https://www.zhihu.com/equation?tex=t) 时刻的权重。(6)式表示的是把每个观测值乘以权重后再平均。这种方法适用于观测值本身带有置信度的情况。使用加权滑动平均法,将每个航点的前后三个航点代入到公式中得到处理之后的数据。在使用加权滑动平均法之后还需要使用差值的方法对处理后的航点文件的每个航点之间插入中位数,原因是原始数据只有10HZ的频率,10HZ的控制频率对无人机来说有点太低了,所以需要插入中位数来实现航点数据翻倍的效果,使用加倍后的航点数据可以使无人机的控制频率达到20HZ。处理后的航点数据在飞行之后的
|
||||
|
||||
##### 飞行轨迹复现
|
||||
|
||||
##### 航点数据存储
|
||||
|
||||
##### 账号登录
|
||||
|
||||
##### 航点数据读取
|
||||
|
||||
##### 轨迹复现
|
||||
|
||||
### 系统测试
|
||||
|
||||
#### 测试的定义及目的
|
||||
#### 测试的重要性及目的
|
||||
|
||||
软件测试是程序的一种执行过程,目的是尽可能发现并改正被测试软件中的错误,提高软件的可靠性。它是软件生命周期中一项非常重要且非常复杂的工作,对软件可靠性保证具有极其重要的意义。通过测试也可以发现软件的不如,可以根据测试结果进行优化。同时无人机软件涉及到无人机的飞行控制,若软件在无人机的飞行期间发生故障,会造成无人机的失控,无人机的失控可能会对周围环境和人员造成巨大伤害。故需要完成软件测试才算是完成软件的开发任务。
|
||||
|
||||
#### 测试的方法及流程
|
||||
|
||||
由于本软件的主要功能是录制无人机航线并通过自动复飞复现录制的航线,涉及到无人机的飞行,故测试要首先在大疆提供的DJI assistant2软件中的无人机模拟器中进行,在模拟器中测试完成之后在进行室外的真机测试。
|
||||
|
||||
测试时首先在验证软件的各个按键是否有效,以及软件是否存在闪退现象,之后使用软件测试无人机在模拟器中的飞行情况,主要包括使用本软件操控无人机时是否正常,在确认无人机在模拟器中正常飞行之后,进入录制模式,录制航线,航线要求足够复杂,要涉及到实际飞行中的各个情况,包括直线,曲线,爬升,降低,转向,以及这些动作的组合,同时要设计不同的拍照点,不同的拍照形式,无人机悬停时拍照,无人机飞行中拍照,同一位置拍多张照片。在录制完测试航线之后,进入复飞模式,加载测试航线,执行复飞任务,观察两次飞行的轨迹是否重合,观察是否在相同的位置拍照。同时查看软件在复飞过程中是否存在bug。在复飞任务正常执行完成之后,读取log日志,通过查看日志判断无人机飞行数据是否正常。
|
||||
|
||||
在模拟器测试通过之后,需要前往室外测试点进行测试,首先在一片空旷的地方进行测试,在空旷的地方尽可能的设计复杂的航线进行测试,在复飞过程中暂时只能根据肉眼观察复飞效果,复飞结束之后根据日志信息和两次飞行的照片对比分析复飞过程中是否存在问题。空旷场地测试完成之后即可进行无人机真正的作业环境进行测试,根据作业环境的工作流程录制相应的航线并复飞,根据两次飞行过程中采集到信息来分析软件功能是否正常。
|
||||
|
||||
### 总结与展望
|
||||
|
||||
#### 测试的方法
|
||||
#### 本文的主要工作
|
||||
|
||||
#### 测试流程
|
||||
本文主要通过DJI 提供的Mobile SDK 和UX SDK在android平台上开发了一款用于无人机自动巡检的app。对无人机的组成和应用控制无人机飞行原理以及移动端应用开发过程进行了深入的研究,所做的主要工作如下:
|
||||
|
||||
### 总结
|
||||
* 无人机的飞行控制
|
||||
|
||||
根据DJI SDK 可以直接对无人机发送速度控制指令的方法设计了一个简单的位置控制器,实现了对无人机位置的控制,并通过这个位置控制器实现了对无人机飞行轨迹的控制,同时使用DJI SDK action 的方法实现了对无人机的云台相机的控制,并将两种控制方式结合起来实现了对录制的飞行轨迹的复现。
|
||||
|
||||
* 无人机的数据采集和处理
|
||||
|
||||
根据设计的控制的需要对无人机的飞行数据进行采集和存储,并且对数据做了一定处理,首先将数据从大地坐标系转换为东北天坐标系,之后又对数据进行了平滑处理,主要用到的方法是加权滑动平均法,之后对数据做了插值处理,通过插值的方法间接提高了对无人机的控制频率,通过对数据的一系列处理,使得无人机的飞行变得更加平稳。
|
||||
|
||||
* 无人机自主飞行测试
|
||||
|
||||
将在开发工具中编写好的应用部署安装到 Android 系统的智能手机上,利用大疆提供的无人机模拟飞行 PC 软件 DJI assistant2,连接无人机和电脑,手机和遥控器,在应用中录制航线并复飞录制的航线,同时也在户外真实环境下进行了类似的测试。
|
||||
|
||||
### 不足与展望
|
||||
|
||||
本研究内容利用大疆的无人机结合其提供的移动开发平台 Mobile SDK 和 Android应用的开发知识开发出一款可以通过录制标准航线并加载航线实现自动化巡检的应用。但鉴于本人能力和水平的限度、时间紧迫、资料有限,取得阶段性的成果的同时,软件还有很多技术细节和想法有待加强和完善,还有许多待完善的功能,如设置云端登录账号,航点文件存储到云端便于随时读取。对无人机飞行日志的自动化分析和上传。同时本应用还可以开发IOS版本以覆盖到更多的使用人群。
|
||||
|
||||
## 参考文献
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
## 作者简历
|
||||
|
||||
## 学位论文数据集
|
||||
|
||||
Loading…
x
Reference in New Issue
Block a user