更新phenix mini相关
This commit is contained in:
parent
0b0750b6e3
commit
4e658a2048
22
# phenix mini 无人车编队.md
Normal file
22
# phenix mini 无人车编队.md
Normal file
@ -0,0 +1,22 @@
|
|||||||
|
# phenix mini 无人车编队
|
||||||
|
|
||||||
|
### 之前进展
|
||||||
|
|
||||||
|
* 找到了phenix mini 控制无人车的方法,但是物料还未到达无法实施
|
||||||
|
* 根据资料和参考之前的硬件连接方法,使用phenix mini 的uart接口连接定位器,经过测试连接时没反应,后续需要何鹏鑫帮忙分析下定位器原理图,正确连线引出需要的数据
|
||||||
|
|
||||||
|
### 待解决问题
|
||||||
|
|
||||||
|
* phenix mini 控制小车移动
|
||||||
|
* phenix mini和定位器之间的通信
|
||||||
|
|
||||||
|
### 未来计划
|
||||||
|
#### phenix 控制小车移动
|
||||||
|
* 重写px4无人车混控器,修改小车模式的混控器使之能够控制麦克纳姆轮的小车(4月13日)
|
||||||
|
* px4无人车的位置控制可能也需要修改
|
||||||
|
|
||||||
|
#### phenix mini 和定位器之间的通信
|
||||||
|
* 等待何鹏鑫帮忙找到合适方法把定位器发送的数据用uart接口引出
|
||||||
|
* phenix mini 的mavlink intsance 数量已达四个需要删掉两个以供定位器使用,选出两个instance并删除,删除之后配置phenix mini 的mavlink 使得phenix可以正常接收定位器的数据和指令
|
||||||
|
* 修改phenix mini 的代码使之使用lighthouse定位系统的坐标作为当前的位置并以此进行位置控制
|
||||||
|
* 重写PC端的发送程序,之前的发送程序不适合给phenix mini 使用
|
||||||
32
px4使用外部定位器(VR定位器).md
Normal file
32
px4使用外部定位器(VR定位器).md
Normal file
@ -0,0 +1,32 @@
|
|||||||
|
# px4使用外部定位器(VR定位器)
|
||||||
|
|
||||||
|
### 定位数据发送到PX4
|
||||||
|
|
||||||
|
* 定位数据使用mavlink发送数据包为 ATT_POS_MOCAP,频率30Hz 通过串口发送
|
||||||
|
|
||||||
|
### 代码编译设置
|
||||||
|
|
||||||
|
* px4 版本 1.7.3
|
||||||
|
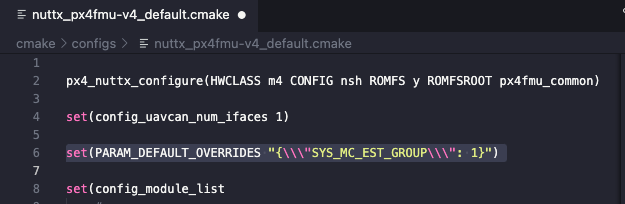
* 将如下代码复制到cmake/configs/nuttx_px4fmu-v4z-default.cmake这个路径中去
|
||||||
|
|
||||||
|
```cmake
|
||||||
|
set(PARAM_DEFAULT_OVERRIDES "{\\\"SYS_MC_EST_GROUP\\\": 1}")
|
||||||
|
```
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
* 编译生成固件刷入飞控
|
||||||
|
|
||||||
|
### QGC参数配置
|
||||||
|
|
||||||
|
* SYS_MC_EST_GROUP 选择local_position_estimator
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
* LPE_FUSION 只选择fuse vision position
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
* ATT_EXT_HDG_M 选择vision
|
||||||
|
|
||||||
|

|
||||||
Loading…
x
Reference in New Issue
Block a user